
MSOT-Q: Multi-Sensor Fusion SLAM with Object Detection Tracking for Quadruped Robots
In recent years, unmanned robots, particularly quadruped robots, have attracted considerable attention owing to their remarkable mobility and payload capabilities. This paper introduces a system to enhance the autonomous perception of quadruped robots through object detection and map building. The primary goal is to improve target tracking and map construction capabilities. To enhance navigation proficiency in challenging environments, we employ a hierarchical controller integrating a proportional derivative control scheme with the model predictive control algorithm based on differential evolution. This controller is strategically crafted to navigate challenging environments effectively. The system underscores the fusion of data from various sensors for simultaneous localization and mapping applications, leading to precise map generation and accurate target tracking. Notably, the dynamic window approach algorithm is utilized to determine the optimal trajectory for target tracking, achieving a harmonious balance between traversability and target localization. Rigorous testing in a demanding simulation environment affirms the effectiveness of the proposed system in significantly improving both target tracking and map construction for the quadruped robot.
May 25, 2024
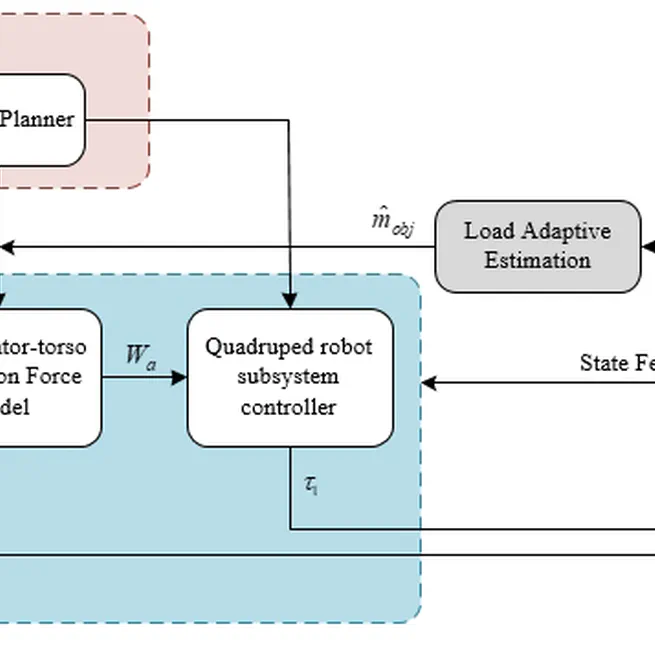
Stable Locomotion Control for Quadruped Mobile Manipulator Based on Adaptive Estimation of Load Mass
The motion and operation of quadruped robots integrated with a manipulator are significant challenges in the field of legged robotics. In this paper, a stable locomotion control method for the quadruped mobile manipulator based on adaptive estimation of load mass is proposed. Firstly, the motion in the joint space is mapped to the end of the manipulator to obtain the motion state of the load, and the load mass is estimated based on the torso dynamics properties. Then, the force required to maintain the motion of the load and manipulator is obtained based on the manipulator dynamics model. Finally, by extending the torso dynamics model, this generalized force is used as a feed-forward compensation term in the upper controller planning to obtain the leg joint torques that satisfy both the torso motion demand and the force required by the manipulator. The feasibility and validity of the proposed method are verified based on the simulation software of Webots. Simulation results show that the robot can estimate the quality of the load and overcome the effects caused by the load to keep itself stable, which can improve the operating performance of the quadruped mobile manipulator.
Jan 1, 2024
SLI-SLAM: Autonomous Navigation and Accurate Mapping for Quadruped Robot in Complex Environments Using LiDAR, Stereo Camera, and IMU Fusion
The proposed algorithm, SLI-SLAM (Stereo Camera-LiDAR-Inertial Measurement unit Fusion SLAM), introduces a comprehensive multi-sensor fusion framework for achieving navigation capabilities in quadruped robots. It combines stereo cameras, LiDAR, and IMU sensors using the factor graph framework for simultaneous localization and mapping (SLAM). It incorporates three types of odometry (LiDAR, Visual, and IMU) and effectively fuse their data to improve system performance. The algorithm enables autonomous perception, navigation, obstacle avoidance, and path planning. During autonomous naviga-tion, the robot continuously perceives the environment, updates its position, and dynamically adjusts the planned path to navigate safely around obstacles. The SLI-SLAM algorithm, in combination with the NDT and GMapping algorithms, facilitates real-time map updates, allowing for adaptation to environmental changes. The SLI-SLAM algorithm has been extensively validated on the popular KITTI dataset and in real-world environments. Compared to other SLAM approaches in complex scenarios, the com-parative analysis demonstrates its accuracy and robustness. Despite challenges in implementation, such as sensor calibration, synchronization, noise, and computational complexity, the SLI-SLAM algorithm has successfully been applied to quadruped robots and extensively tested, confirming its effectiveness and practicality. The SLI-SLAM algorithm enhances robustness, real-time performance, and the integration of environmental information, leading to accurate localization and mapping in complex scenarios.
Jan 1, 2024