Here are a selection of projects that I have worked on over the years.
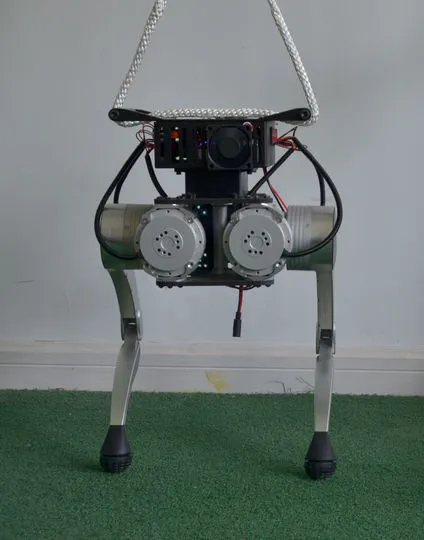
Setup of the Mini Cheetah development environment based on Docker (Ubuntu version 18.04).
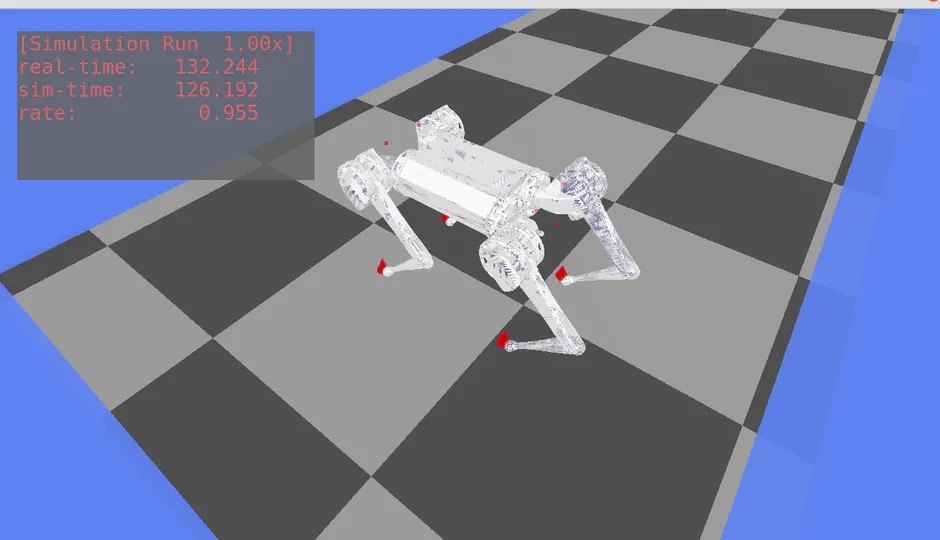
Using the VMC+WBC algorithm to achieve stable motion of bipedal robots.
Fusing D435i and T265 to improve the perception and positioning accuracy of quadruped robots.
The integration of millimeter-wave radar, used for human presence detection, health monitoring, and fall detection, with a quadruped robot.