Stable Locomotion Control for Quadruped Mobile Manipulator Based on Adaptive Estimation of Load Mass
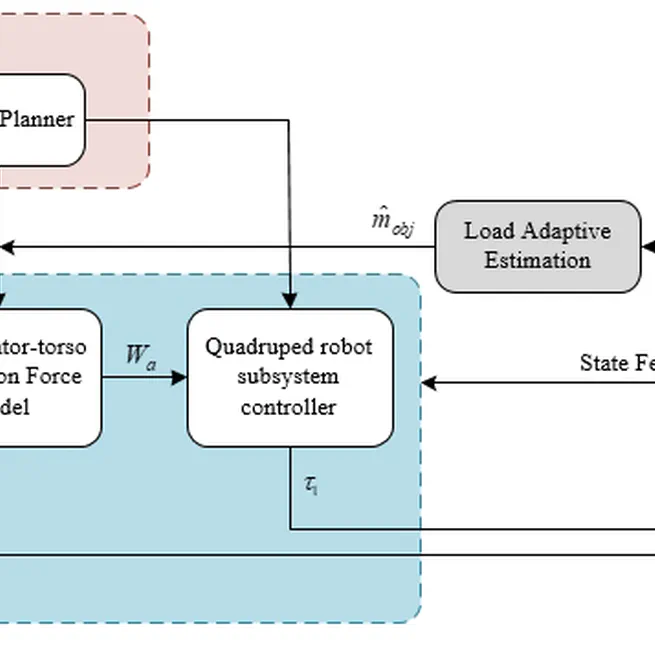
The motion and operation of quadruped robots integrated with a manipulator are significant challenges in the field of legged robotics. In this paper, a stable locomotion control method for the quadruped mobile manipulator based on adaptive estimation of load mass is proposed. Firstly, the motion in the joint space is mapped to the end of the manipulator to obtain the motion state of the load, and the load mass is estimated based on the torso dynamics properties. Then, the force required to maintain the motion of the load and manipulator is obtained based on the manipulator dynamics model. Finally, by extending the torso dynamics model, this generalized force is used as a feed-forward compensation term in the upper controller planning to obtain the leg joint torques that satisfy both the torso motion demand and the force required by the manipulator. The feasibility and validity of the proposed method are verified based on the simulation software of Webots. Simulation results show that the robot can estimate the quality of the load and overcome the effects caused by the load to keep itself stable, which can improve the operating performance of the quadruped mobile manipulator.
Jan 1, 2024
Leader-follower Formation Control for Multiple Uncertain Euler–Lagrange Systems Based on Average Dwell Time
This paper addresses the leader-follower formation control of switched uncertain Euler-Lagrange systems under the condition that the abrupt parameter and communication topology change. Distributed formation tracking performance is achieved through the design of ap-propriate sliding mode variables, which encompass the communication interactions among the robots, and a sufficient condition regarding the switching time among subsystems is derived. First, the networked Euler-Lagrange systems are modeled as switched Lagrange systems, and then a distributed leader-follower formation control strategy is developed based on the average dwell time (ADT). The Lyapunov stable theory performs the closed-loop stable analysis and the simulation example demonstrates the effectiveness of the proposed control techniques.
Jan 1, 2024